ハイブリッドステッピングモーター バッテリーレス・アブソリュートエンコーダ付タイプ
#5ハイブリッドステッピングモーター バッテリーレス・アブソリュートエンコーダ付タイプ

高精度なステッピングモーターの位置管理に貢献する、当社独自の磁気式アブソリュートエンコーダ。
□42/56.4mmモデルでは厚さ13.6mmを実現したエンコーダについて、どのように薄型と高分解能を実現できたのか、ミネベアミツミ東京研究開発センター(TRDC)のエンジニアに話を聞いてみます。
開発のきっかけを教えてください。
東京研究開発センター※(TRDC)でロボティクス用の基幹部品を開発していこうという動きがあり、ドライバ、減速器、そしてエンコーダの開発が検討されました。ここで、エンコーダを担当することになったのですが、近年のロボティクスのトレンドを考慮して、アブソリュート機能と多回転検知機能を、薄型のサイズで実現することをテーマとして開発を始めました
※東京研究開発センター:当社グループの各開発拠点の蝶番として各事業部の製品開発と当社の多様なコア技術による相合※活動を支えている。
※相合:「総合」ではなく、「相い合わせる」ことを意味し、自社保有技術を融合、活用して「コア製品」を進化させるとともに、その進化した製品をさらに相合することでさまざまな分野で新たな製品を創出すること。
「エンコーダ」とはどのような部品なのでしょうか?
エンコーダはセンサーの一種で、正確にはロータリーエンコーダといい、モーターシャフトなどの回転角を検知するために使用します。一般に、モーターを一定速度で回転させたり、正確な位置で停止させたりするためには、エンコーダからの回転角情報や速度情報をフィードバックして制御を行います。そのため、エンコーダの角度精度や分解能がモーター駆動システムの性能に大きく影響します
回転角度はどのように検知するのですか?
| 位置検出方式 | 詳細 |
|---|---|
| 光学式 | LEDなどの光を回転ディスクに透過または反射させ、その光を受光素子で検出 |
| 磁気式 | マグネットからの磁束を検出 |
※実際には誤検知防止のためにグレイコードなどの符号化技術が使われる
※磁気式は原理的にアブソリュートになる
回転角度の検出方式は、大きく分けて、『光学式』、『磁気式』の2種類があります。光学式はモーターシャフトと一体で回転するディスクの回転角を読みとる方式です。ディスクには一定間隔でスリットが切られており、スリットに照射されたLEDの透過光、もしくは反射光を受光素子で取り込み、電気信号に変換することで回転角を検知します。
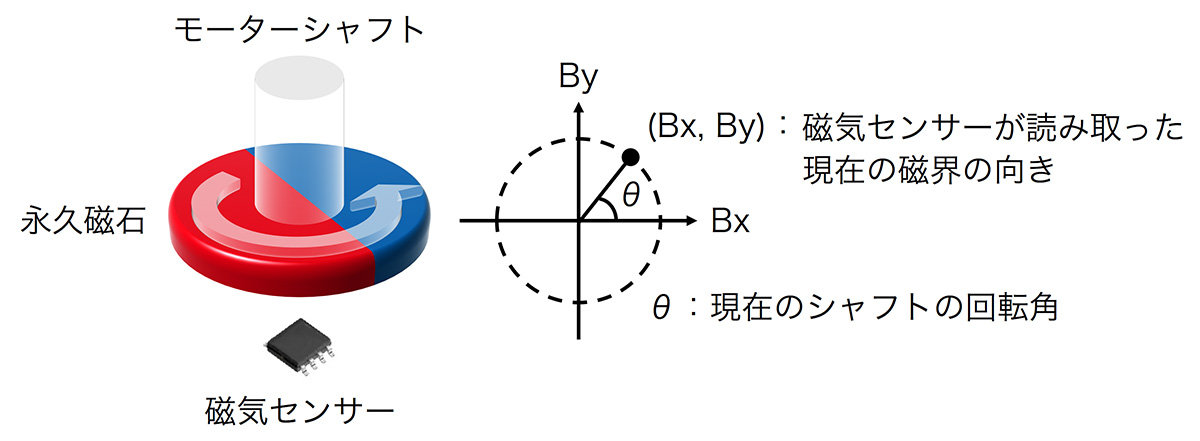
一方、磁気式ですが、光学式がディスクと発光・受光素子で構成されるのに対し、磁気式は永久磁石と磁気センサーで構成されます。シャフトの先端に永久磁石が固定されており、シャフトが回転すると、永久磁石が生成する磁界の方向も変化します。この磁界の様子を磁気センサーで読み取って角度情報に変換することで回転角を検知します。光学式のようなスリットがありませんので、埃、汚れ、油分などに強く、耐環境性に優れています。精度と応答性はまだ光学式の方が優位ですが、近年その差は小さくなってきています
一方、磁気式ですが、光学式がディスクと発光・受光素子で構成されるのに対し、磁気式は永久磁石と磁気センサーで構成されます。シャフトの先端に永久磁石が固定されており、シャフトが回転すると、永久磁石が生成する磁界の方向も変化します。この磁界の様子を磁気センサーで読み取って角度情報に変換することで回転角を検知します。光学式のようなスリットがありませんので、埃、汚れ、油分などに強く、耐環境性に優れています。精度と応答性はまだ光学式の方が優位ですが、近年その差は小さくなってきています
アブソリュートエンコーダの「アブソリュート」って何でしょうか?
電源の有無によらず、エンコーダの絶対位置を保持、もしくは識別する機能です。エンコーダに電源を入れた際に、絶対位置を読み取ることができるため、モーターを駆動させて原点復帰させる必要がありません。脱調した際の復帰時間を短縮したり、原点復帰するためのセンサーを削除したりすることができます。光学式でアブソリュート機能を実現する場合には、回転ディスクに複数のラインパターンを作るといった工夫が必要です。しかし、磁気式の場合はそのような工夫は不要です。永久磁石が作る磁界の向きを直接読み取るので、原理的にアブソリュート方式となります
原点復帰が不要なのはタクトタイムの短縮にも繋がりそうですね。
そうですね。アブソリュートのほかにもう一つ、インクリメンタルという方式もあり、こちらはAch、Bch、Zchのパルス列で回転データを出力します。Ach、Bchは位相が90°ずれたパルス列となっており、それぞれのHigh/Low状態や、立ち上がり、立ち下がりをモニタすることで回転方向や回転変化量を取得できます。Zchは、1回転中の原点を表すパルスです。出力信号がシンプルで、受信回路を安価に構築できるというメリットがありますが、Zchを検出するまで1回転内の絶対位置を認識できないため、位置制御を行う場合は電源ON時に原点出し動作が必要になります
| 出力信号方式 | 詳細 |
|---|---|
| インクリメンタル | 移動量に応じたパルス列を出力する 位置制御を行う場合は電源ON時に原点出し動作が必要 |
| アブソリュート | 絶対位置を直接出力する 原点出し動作は不要 |
位置検出は主に光学式と磁気式、信号出力はインクリメンタルとアブソリュート、それぞれの方式に利点があるということですね。
はい、今回は磁気式のアブソリュートエンコーダを採用しました
バッテリーレスということですが、詳しく教えてください。
アブソリュートエンコーダは電源OFFの状態で、回転角度の他に、回転数を保持する機能が必要となることが多いです。例えば、リードピッチ5mmの送りねじやボールねじを使った電動スライダを駆動したい場合、スライダを100mm動作させるためには、モーターを20回転させる必要があります。回転数の保持には、バッテリーによりメモリ内に多回転データを保持するバッテリーバックアップと、バッテリーを用いないバッテリーレスバックアップの二つの方法があり、更に後者はギアの歯数の組み合わせにより機械的に多回転データを保持するギア方式と、発電素子により不揮発性メモリ内に多回転データを保持する発電素子方式があります
多回転データを保持する方法もいくつかあるんですね。
私たちが開発したのはバッテリーを使用しないギア方式です。メンテナンス性、コスト削減、省配線などのメリットから、近年では、需要のほとんどがバッテリーレスになっています
ギア方式とはどのような仕組みなのでしょうか?
アナログ時計をイメージしてもらえると分かりやすいかと思います。アナログ時計って針が3つありますよね?
秒針、長針、短針ですね。
そうです。モーターが1回転すると秒針が1周するとします。そうすると、1回転で長針が1目盛進み、長針が60目盛進むと短針が1目盛進みますよね
秒針60回転で短針が1目盛……でしょうか。
はい。短針は12目盛ありますから、アナログ時計は長針60×短針12で720回転が表現できます。アナログ時計をエンコーダと捉えると、1回転当たりの分解能が60で最大720回転まで保持できるアブソリュート方式のエンコーダということになります
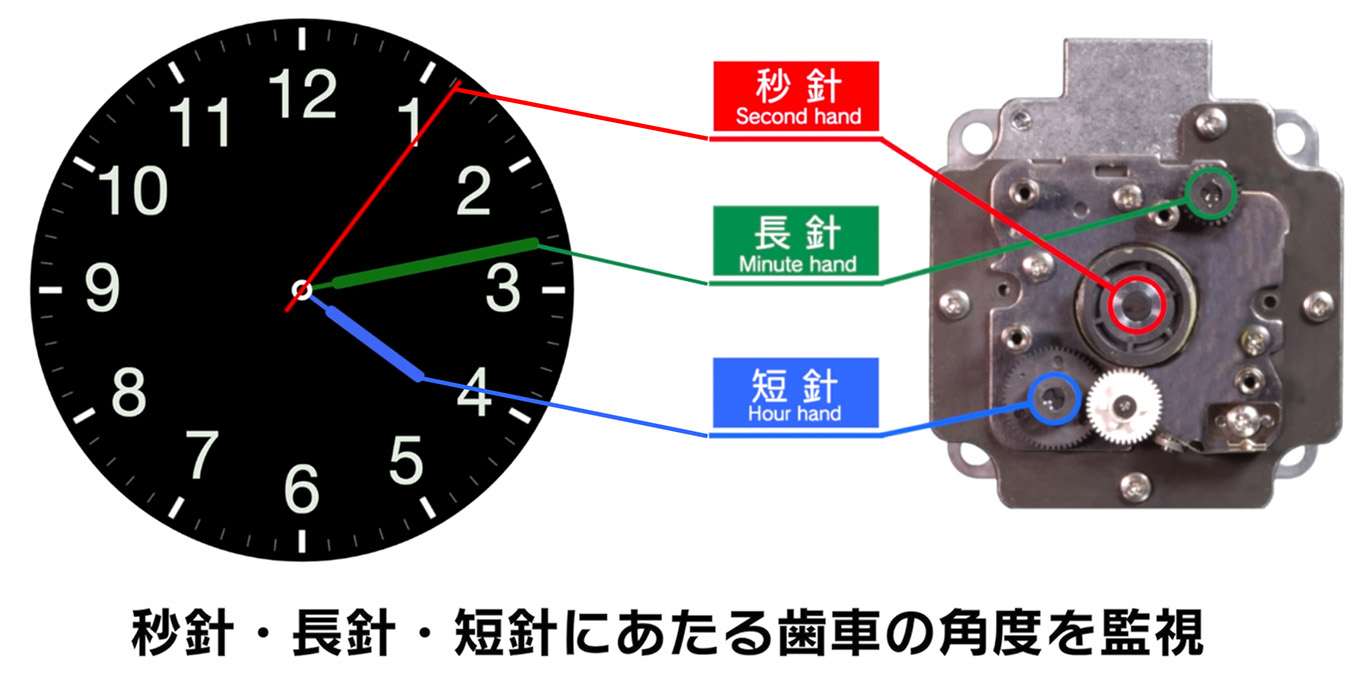
3つの針の位置を読み取ってモーターの回転数を見るわけですね。
ギアの比率によって、識別できる回転数が変わってきます。ミネベアミツミの42角、56角サイズモーターに取り付けるエンコーダでは、1000ターンまで対応できます
開発は順調に進んだのでしょうか?
磁場干渉が問題でした。先ほどの時計の例でいうと、秒針、長針、短針それぞれに永久磁石と磁気センサーが取り付けられています。これらが近すぎると磁石が互いに干渉し誤検知に繋がってしまうのです。それから、ステッピングモーター自身も磁界を持ちますので、その影響も抑えなければなりません
磁気式とエンコーダの薄型化を両立するのは難しいように思うのですが……。
社内に磁性体を作る研究室があったり、磁石を内製していたのが大きかったですね。磁石同士をどれくらい離せばいいんだろう、磁力を弱くすればいいんじゃないか、でも弱すぎると検知できなくなってしまう、磁石のサイズや材質は……と試行錯誤しました。ステッピングモーターとの干渉については、エンコーダとの間に1枚薄いシールドを設けたのですが、この材質や厚みについてもいろいろと検討しました
磁場干渉の問題は解決できたのですね。
ギアの設置スペースの問題もありました。小さなスペースに高減速のギアをどのように組み込むかということもありますし、コストも考慮する必要があります。樹脂材料は耐久性や温度変化に注意しつつ、ギアの回転軸も安定させなければなりませんが、回転のブレが一定ではないので補正が難しく、メカ的に抑えるしかありませんでした。最終的にはギアの軸に自社製のボールベアリングを採用することで解決できました
磁石、ボールベアリングと内製部品が活躍したのですね。社内やお客様からの反応はいかがでしたか?
おかげ様でご好評をいただいています。近年の、産業用装置やロボティクスではエンコーダをアブソリュート化していこうというトレンドがあるようです。それから、この製品はインクリメンタル方式のAch、Bch、Zch出力にも対応していますので、ご使用環境に合わせて自由に選択いただけます。例えば、電源起動時やエラーからの復帰にはアブソリュート機能で現在位置のデータを取得し、以降は制御しやすいインクリメンタル方式の出力信号を使用するといった使い方ですね
最後に、今後の展開について教えてください。
現在は56.4角、42角、28角と3種類のサイズのラインアップがありますが、もっと小さいサイズにチャレンジしていきたいですね。磁場干渉など解決しなければならない課題は多いですが、一つずつ乗り越えていきたいです
今回ご紹介した製品はこちら
ハイブリッドステッピングモーター バッテリーレス・アブソリュートエンコーダ付タイプ
ハイブリッド型のステッピングモーターに、独自のセンサー機構で薄型を実現したバッテリーレスのアブソリュートエンコーダを搭載した「Mシリーズ」です。
アナログ時計の時間計測原理を応用した、当社独自の磁気式アブソリュートエンコーダにより、非通電時でもバックアップ電源なしで現在位置の保持が可能です。さらに、非常停止時も原点復帰なしに運転再開ができるため、原点復帰に必要な原点センサーやリミットセンサーも削減しながら、タクトタイムの短縮にも貢献します。
位置検出方式は、アブソリュート出力・インクリメンタル出力から選べ、サイズは□28mm / □42mm / □56.4mmのL寸違いで全9種類をラインアップしています。
詳しくはこちら
アナログ時計の時間計測原理を応用した、当社独自の磁気式アブソリュートエンコーダにより、非通電時でもバックアップ電源なしで現在位置の保持が可能です。さらに、非常停止時も原点復帰なしに運転再開ができるため、原点復帰に必要な原点センサーやリミットセンサーも削減しながら、タクトタイムの短縮にも貢献します。
位置検出方式は、アブソリュート出力・インクリメンタル出力から選べ、サイズは□28mm / □42mm / □56.4mmのL寸違いで全9種類をラインアップしています。