Encoder Stepper Motor Selection Guide: Performance & Application
What defines the optimal stepper motor with an encoder?
Encoder-equipped motors vary widely in type and application. Whether your goal is to prevent missed steps, improve positioning accuracy, or eliminate homing operations, the optimal choice depends on your specific objectives. This article provides a thorough, engineering-focused comparison of all six stepper motor series*1 to ensure you avoid over-specification and mismatching.
Download our guide featuring a selection flowchart to instantly identify your ideal motor type.
1. Encoder-equipped stepper motors: Features and comparison
Encoders continuously monitor the motor’s rotational position (angle) and provide feedback to the controller. This allows for the detection of "stalls (missed steps)" and "positional errors"—common drawbacks of stepper motors—ensuring high reliability. MinebeaMitsumi offers a comprehensive lineup of six series*1 utilizing three detection methods, including built-in Hall ICs for simplified rotation detection.
1-1.Series Features
Hall IC Method
Optical Encoder Method
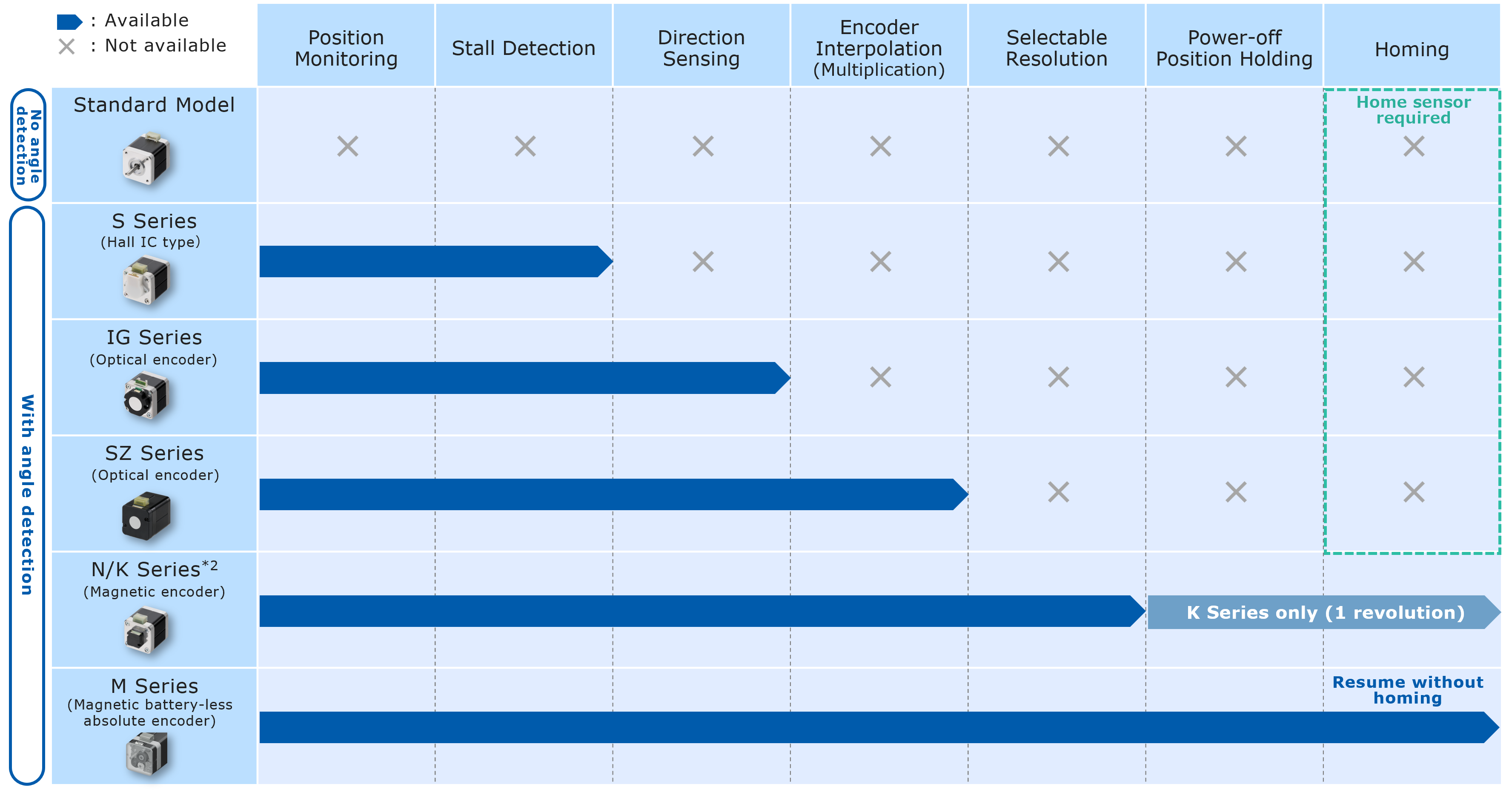
- Detects both rotation and direction. (400 cpr)
- Higher precision positioning than the IG series. (1,600–4,000 cpr, depending on motor size)
Magnetic Encoder Method
- High-precision positioning regardless of motor size. (1–4,000 cpr; specified at order)
- Adds single-turn absolute position retention to N Series features. (1–4,000 cpr; specified at order)
- Battery-less absolute position retention during power-off (200–1,000 rotations, depending on motor size). Resumes operation without homing to reduce cycle time. (1–4,000 cpr; specified at order)
*2 N/K Series scheduled for release around May 2026. Please contact us for sample availability.
1-2.Series Feature Comparison
スクロールできます
2. Selection guide: Finding the optimal motor for your application
"Tracking rotation angles" requires different solutions depending on precision requirements and the operating environment. Below, we outline selection criteria alongside specific application examples to help you identify the optimal series.
-
S Series: Hall IC
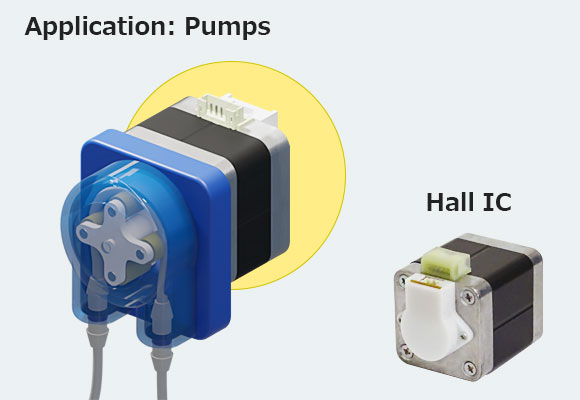
- Detects stalls in unidirectional rotation.
- Ideal for systems where precise positioning or directional feedback is not required.
Usage ExamplesDishwasher pumps, medical pumps, dispenser pumps, etc.
-
IG Series: Optical Encoder
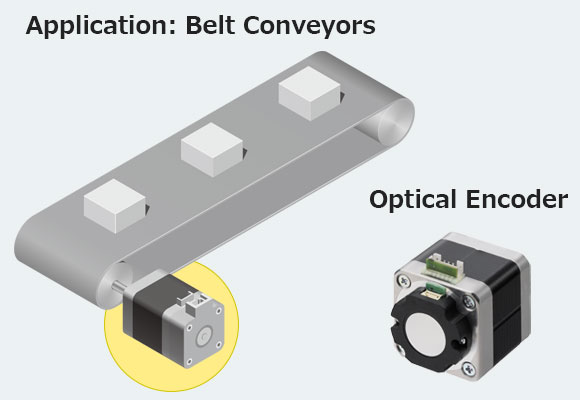
- For bi-directional "continuous feed" operations.
- Suitable for applications not requiring micron-level angular precision.
- Ideal where home position signals or detailed rotation data are unnecessary.
Usage ExamplesMedical specimen conveyors, food transport conveyors, sorting conveyors, etc.
-
SZ Series: Optical Encoder
- Detect the Z-phase once per revolution to identify the exact home position.
- For bi-directional "finite feed" operations.
- Ideal for applications requiring high-precision angle detection, home signals,and rotation data.
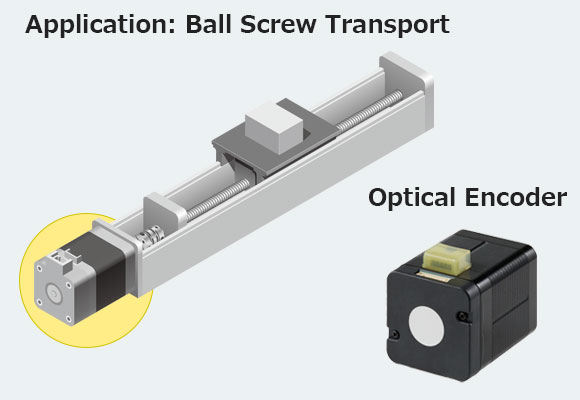
Usage ExamplesXYZ robotic tables, electric actuators, precision positioning equipment, etc.
-
N/K Series*2: Magnetic Encoder

- Provides high-precision angle detection, home signals, and rotation data regardless of motor size.
- Ideal for applications requiring single-turn absolute position retention (K Series).
Usage ExamplesSurveillance cameras, reversing machines, specimen rotary tables, ball screw drives, etc.
-
M Series: Magnetic Absolute Encoder
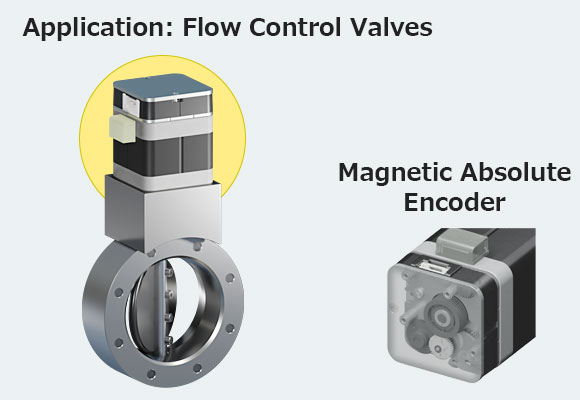
- Ideal for finite operating ranges where position retention is required during power loss.
- Enables immediate operation restart from the current position without homing.
Usage ExamplesFlow control valves, semiconductor gas valves, chemical control valves, etc.
3. Summary: Critical points for integration
- Encoder-equipped models (angle detection types) detect rotational position errors and stalls.
- Not every application demands a high-performance magnetic encoder motor like the M Series. For simple rotation monitoring, selecting the S Series can significantly reduce component costs.
- Select the detection method (Optical vs. Magnetic) best suited to your environment. Magnetic encoders are often more reliable in dusty or oily conditions, whereas optical encoders are recommended for environments with strong magnetic fields. The key is to select a series based not only on specifications but also on the operating environment.
- MinebeaMitsumi offers a total of six series*1 across three detection methods, allowing us to propose the motor that best matches your specific challenges. If you are unsure about selection, please feel free to contact us.
4. FAQ
QWhat is the difference between "Optical" and "Magnetic" encoders?
AThe difference lies in the method used to detect rotation angles.
- Optical Encoders: These read the number of times light passes through slits in a rotating disc. They are relatively sensitive to dust and physical shock.
- Magnetic Encoders: These detect changes in the magnetic field caused by a rotating magnet. Due to recent improvements in resolution allowing for fine position detection, they are becoming the mainstream choice. However, they are susceptible to external magnetic fields, so optical encoders may still be preferred depending on the installation environment.
QWhat is the difference between "Incremental" and "Absolute" encoders?
AThe fundamental difference is whether the encoder retains position data. For example, when restarting a motor after a power loss:
- Incremental (Relative): Position data is lost when power is turned off. A "return-to-origin" (homing) sequence is always required before resuming operation.
- Absolute (Absolute): Absolute position data is retained by the motor. Operation can resume immediately from the stopped position without homing upon power restoration.
QWhat is the difference between "Open Collector" and "Differential (Line) Driver" encoder signals?
AThey differ in signal transmission structure and noise immunity.
- Open Collector: Known as "single-ended," this method determines ON/OFF status based on voltage changes on a single signal line.
- Differential (Line) Driver: This uses two signal lines to transmit opposing (differential) signals—when one is ON, the other is OFF. Because external noise affects both lines equally, the "difference" between them remains constant. This effectively cancels out noise interference, allowing for longer cable runs without signal loss.
QWhat are the output specifications for MinebeaMitsumi’s absolute encoders?
AThey utilize RS-485 communication (serial output).
Additionally, our motors with absolute positioning functions (K Series*2 and M Series) support both absolute data output and differential line driver output.
Click here for Stepper Motor inquiries and material requests
Related Page
Engineering Information for Hybrid stepping motors
Technical Column
Technical Data
Precautions of Use
Explanation of Technical Terms
Contact Us
Please click the inquiry type below according to your question. Each product / sales representative will respond to you.