失敗しないエンコーダ付きステッピングモーターの選び方|種類・機能・用途別比較
最適なエンコーダ付きステッピングモーターとは?
1. エンコーダ付きステッピングモーターとは? 特徴と機能比較
エンコーダはモーターの回転位置(角度)を常に監視し、その情報をコントローラーにフィードバックする役割を持ちます。これにより、ステッピングモーターの弱点とされる「脱調」や「位置ズレ」を検出し、高い信頼性を確保できます。
ミネベアミツミではエンコーダに加え、簡易的な回転検出が可能な「ホールIC付き」ステッピングモーターを含めた3方式・全6シリーズ*1を展開しています。
1-1.シリーズごとの特徴
ホールIC方式
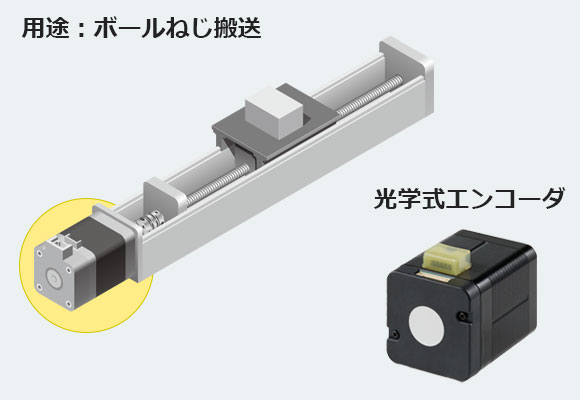
光学式エンコーダ方式
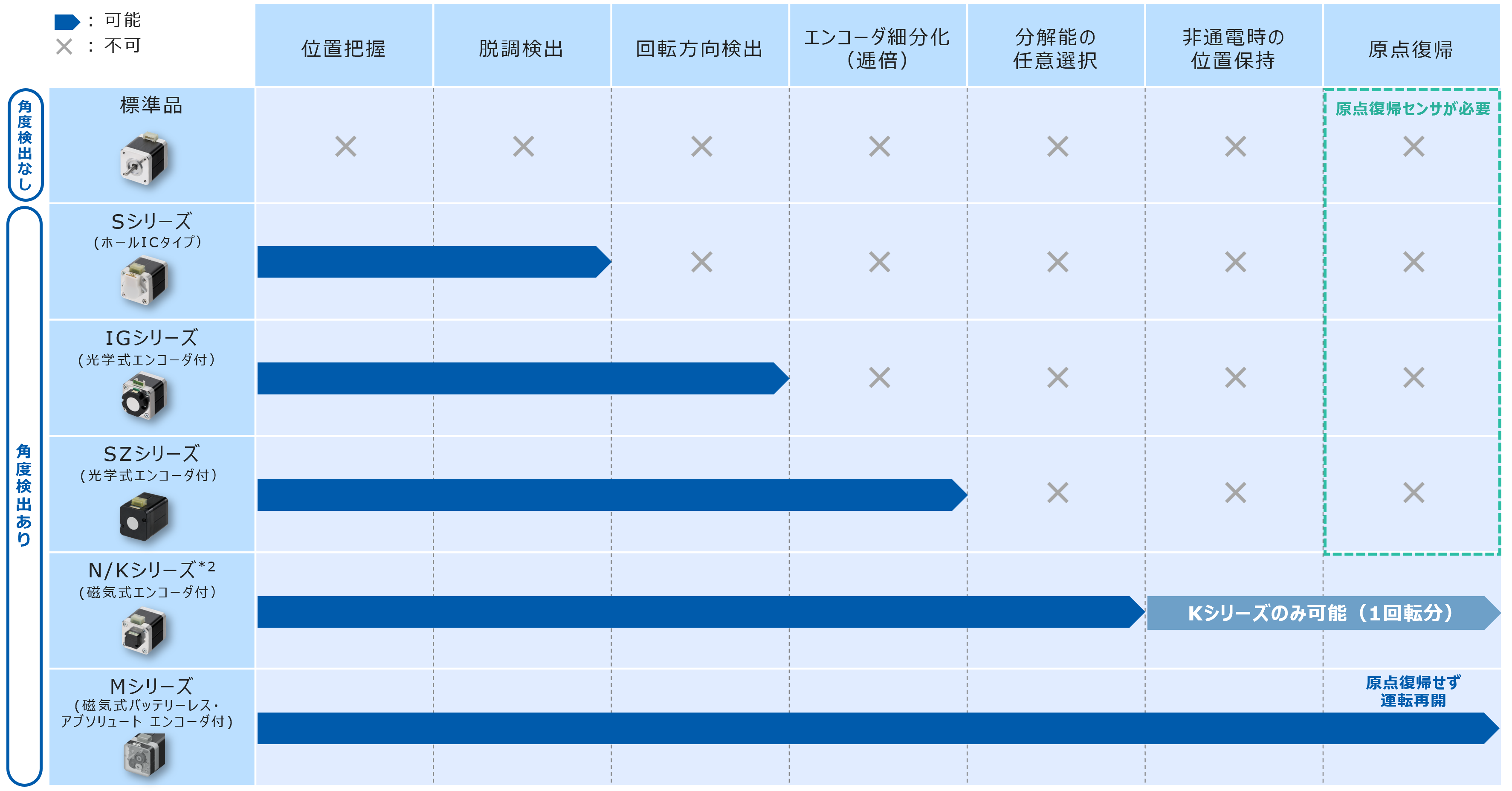
SZシリーズ :IGシリーズよりも高精度な位置把握。(モーターサイズにより1,600~4,000cpr)
磁気式エンコーダ方式
Kシリーズ*2:Nシリーズの機能+非通電時の位置情報(1回転内)を保持。( 1~4,000cprの範囲で指定可)
Mシリーズ :バッテリー不要で非通電時での位置情報(モーターサイズにより200~1,000回転分)を保持。
原点回帰せずに運転再開し、タクトタイムを短縮。(1~4,000cprの範囲で指定可)
*2 N/Kシリーズは2026年5月発売予定。サンプルの貸出は、お気軽にお問合せください
1-2.シリーズごとの機能比較
スクロールできます
2. 最適なエンコーダ付きステッピングモーターの選び方と用途例
「回転角度の把握」といっても、求められる精度や動作環境によって最適なシリーズは異なります。ここでは具体的なアプリケーションとともに、選び方の基準をご紹介します。
-
ホールIC付き -Sシリーズ-
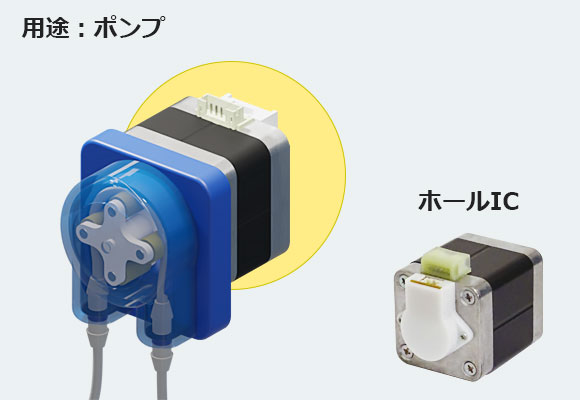
- ポンプなど一方向の回転の脱調検知
- 細かい位置や回転方向の検出は不要な用途
用途例食器用ポンプ、医療用ポンプ、ディスペンサ用ポンプ 他
-
光学式エンコーダ方式 -IGシリーズ-
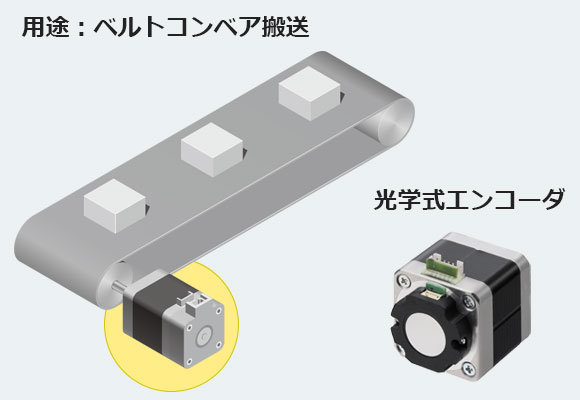
- 正転逆転両方向に回転し「無限長送り」するもの、ミクロンレベルでの角度検出精度は求めない用途
- 原点信号や回転情報は不要な用途
用途例医療検体搬送コンベア、食品輸送コンベア、製品仕分けコンベア 他
-
光学式エンコーダ方式 -SZシリーズ-
- 一回転に一度、Z相を検出することで、より正確な原点位置を特定
- 正転逆転両方向に回転し「有限長送り」するもの
- 高精度な角度検出、原点信号、回転数情報が必要な用途
用途例XYZロボテーブル、電動アクチュエータ、精密位置決め機器 他
-
磁気式エンコーダ付き -N/Kシリーズ*2-

- モーターサイズ問わず高精度な角度検出、原点信号、回転数情報が必要な用途
- 一回転以内の位置記憶が必要な用途(Kシリーズ)
用途例監視カメラ、反転機、検体の回転テーブル、ボールねじ搬送 他
-
磁気式アブソリュート・エンコーダ付き -Mシリーズ-

- 可動域が有限で非通電時も位置情報の保持が必要な用途
- 原点復帰をせずに現在位置から運転再開が必要な用途
用途例流量調整バルブ、半導体用ガスバルブ、薬液調整バルブ 他
3. エンコーダ付きステッピングモーター導入のポイント(まとめ)
- エンコーダ付き(角度検出付き)タイプはモーターの回転位置のずれや脱調の検出ができます。
- すべての用途に高機能な磁気式エンコーダ付きモーター(Mシリーズなど)が必要なわけではありません。例えば、単なる回転監視であればSシリーズを選ぶことで、部品コストを抑えることができます。
- 環境に合わせた方式(光学式 vs 磁気式)を選択しましょう。ホコリや油分が多い環境では光学式よりも磁気式が有利な場合があります。逆に、強力な磁場が発生する環境では光学式が推奨されます。スペックだけでなく、使用環境も考慮してシリーズを選定することがポイントです。
- ミネベアミツミでは、全3方式・6シーズ*1から課題にベストマッチするモーターをご提案可能です。選定に迷われた際は、お気軽にご相談ください。
4. よくあるご質問(FAQ)
Qエンコーダの「光学式」と「磁気式」の違いは何ですか?
A回転角度の検出方法が異なります。
- 光学式エンコーダ: スリットが入った円盤に光を通し、そのスリットを通過した回数を読み取る方式です。ホコリや衝撃には比較的弱いです。
- 磁気式エンコーダ: 磁石の回転による磁界の変化をセンサーで検出する方式です。近年は分解能が細かく、細かい位置検出ができるため主流になりつつありますが、外部磁場の影響を受けやすいため、設置環境より光学式を使う場合があります。
Qエンコーダにおける「インクリメンタル方式」と「アブソリュート方式」の違いを教えてください。
Aエンコーダ自体に位置情報を記憶する機能があるかないかの違いです。例えば、装置の電源が落ちてモーターを再起動する場合、以下の違いがあります。
- インクリメンタル方式(相対値): エンコーダの電源をOFFにすると、位置情報がリセットされてしまうため、運転再開には必ず原点復帰(基準位置に戻す動作)が必要です。
- アブソリュート方式(絶対値): 絶対的な位置情報をモーター側で保持しているため、電源再投入後も原点復帰せず、そのまま停止した位置から運転を再開できます。
Qエンコーダ信号の「オープンコレクタ」と「差動(ライン)ドライバ」の違いは何ですか?
Aオープンコレクタは「シングルエンド」と呼ばれ、一本の信号線の電圧変化だけでON/OFFを判断します。
一方、差動(ライン)ドライバは2本の信号線を使用します。常に「片方がONの時、もう片方はOFF」という「互いに逆の信号(差動信号)」を送る仕組みです。これにより、途中でノイズが入っても「差」は変わらないのでノイズの影響を打ち消し、ケーブルを長く伸ばせるというメリットがあります。
Qミネベアミツミのアブソリュートエンコーダの出力仕様を教えてください。
ARS-485通信(シリアル出力)です。
また、ミネベアミツミのアブソリュート機能付きモーター(Kシリーズ*2、Mシリーズ)はアブソリュート出力、差動ラインドライバ出力の両方に対応しています。
ステッピングモーターに関する資料請求・お問い合わせはこちらから
関連ページ
ハイブリッドステッピングモーターの技術情報
技術コラム
技術資料
使用上の注意及びお願い
技術用語説明


