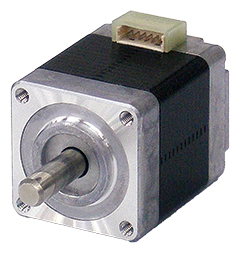
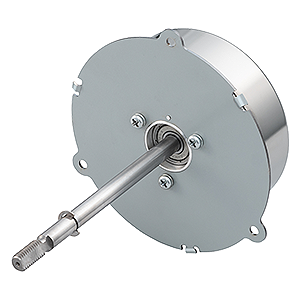
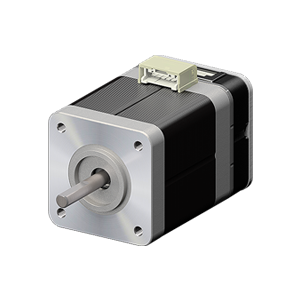
Stepping motors rotate at fixed angles with digitally controlled electronic pulses and they are able to start, stop and position with good control characteristics. Hybrid-type stepping motors consist of a rotor with permanent magnets and magnetic bodies, and by using ball bearings they can perform highly precise and reliable motions. Stepping motors can be used in wide range of applications, such as copy machines, multifunction printers, medical equipment, semiconductor manufacturing equipment, factory automation equipment, robots and other industrial equipment.
-
-
Click the arrow icon in the table below to switch from ascending to descending order.
scroll
Model
Outer Diameter
[mm]Step Angle
[°]Drive Sequence
Rated Current
[A]Resistance
[Ω]Holding Torque
[mN・m]Inductance
[mH]Rotor Inertia
[g・cm2]Detent Torque
[mN・m]Mass
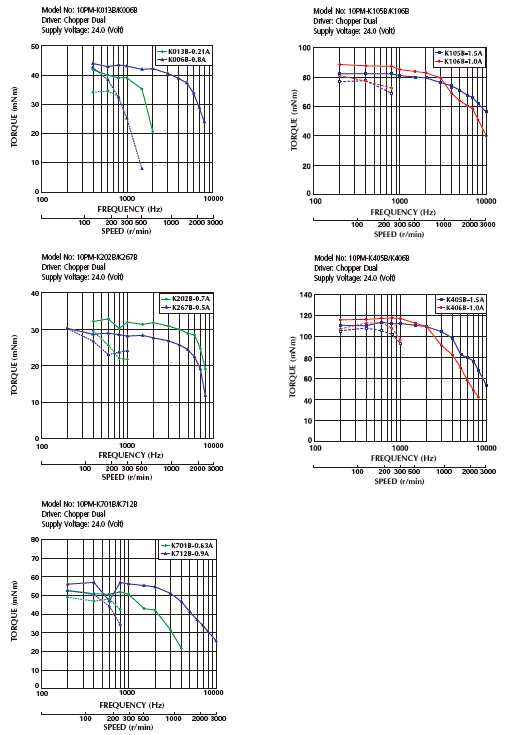
[g]10PM-K013B 25.0 1.800 BI-POLAR 0.21 47.00 49 30.00 3.00 2.50 70 10PM-K006B 25.0 1.800 BI-POLAR 0.80 2.60 49 1.70 3.00 2.50 70 10PM-K105B 25.0 1.800 BI-POLAR 1.50 1.20 90 1.00 8.00 4.00 110 10PM-K106B 25.0 1.800 BI-POLAR 1.00 3.00 90 2.50 8.00 4.00 110 10PM-K202B 25.0 1.800 BI-POLAR 0.70 3.80 33 2.00 2.00 2.00 55 10PM-K267B 25.0 1.800 BI-POLAR 0.50 7.70 33 3.50 2.00 2.00 55 10PM-K405B 25.0 1.800 BI-POLAR 1.50 1.60 120 1.60 12.00 5.00 150 10PM-K406B 25.0 1.800 BI-POLAR 1.00 3.80 120 3.60 12.00 5.00 150 10PM-K701B 25.0 1.800 BI-POLAR 0.63 5.80 62 5.40 5.00 3.00 90 10PM-K712B 25.0 1.800 BI-POLAR 0.90 3.10 62 2.80 5.00 3.00 90 -
-
scroll
Model
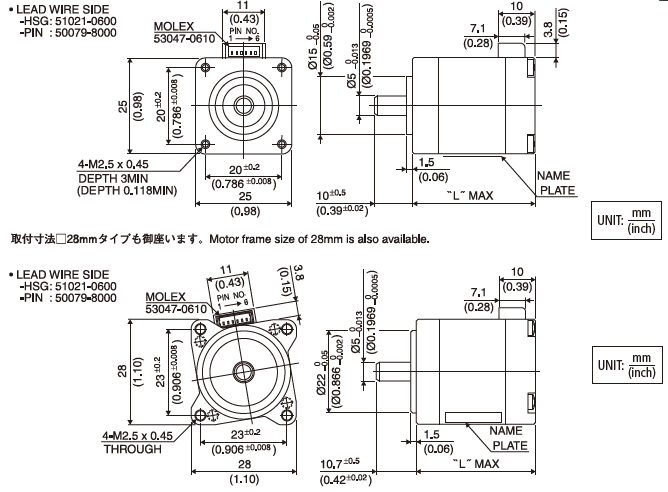
size "L"
[mm]size "L"
[Inch]10PM-K2** 23.5 0.92 10PM-K0** 27.5 1.08 10PM-K7** 33.0 1.30 10PM-K1** 40.5 1.59 10PM-K4** 51.5 2.03 -
-
scroll
PHASE
A
A/
B
B/
PIN NO. 4 6 1 3 -
Associated Data
CAD
Featured Products
Engineering Information
Technical Data
Precautions of Use
Explanation of Technical Terms
Case Studies
Download
Product Topics
Industry






Contact Us
Please click the inquiry type below according to your question. Each product / sales representative will respond to you.