・High-precision grip force control, speed control and position control are feasible.
・Work sizes and work falls are also detectable.
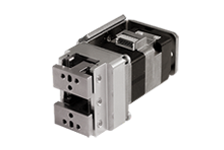
・Reduced in size and weight by adopting the cam mechanism, and multidimensional mounting made feasible with robot arms or the like.
Features
■Cam Structure
Adopts a spiral cam structure.
Provides excellent transmission efficiency to linear motion, achieving high precision and high efficiency.
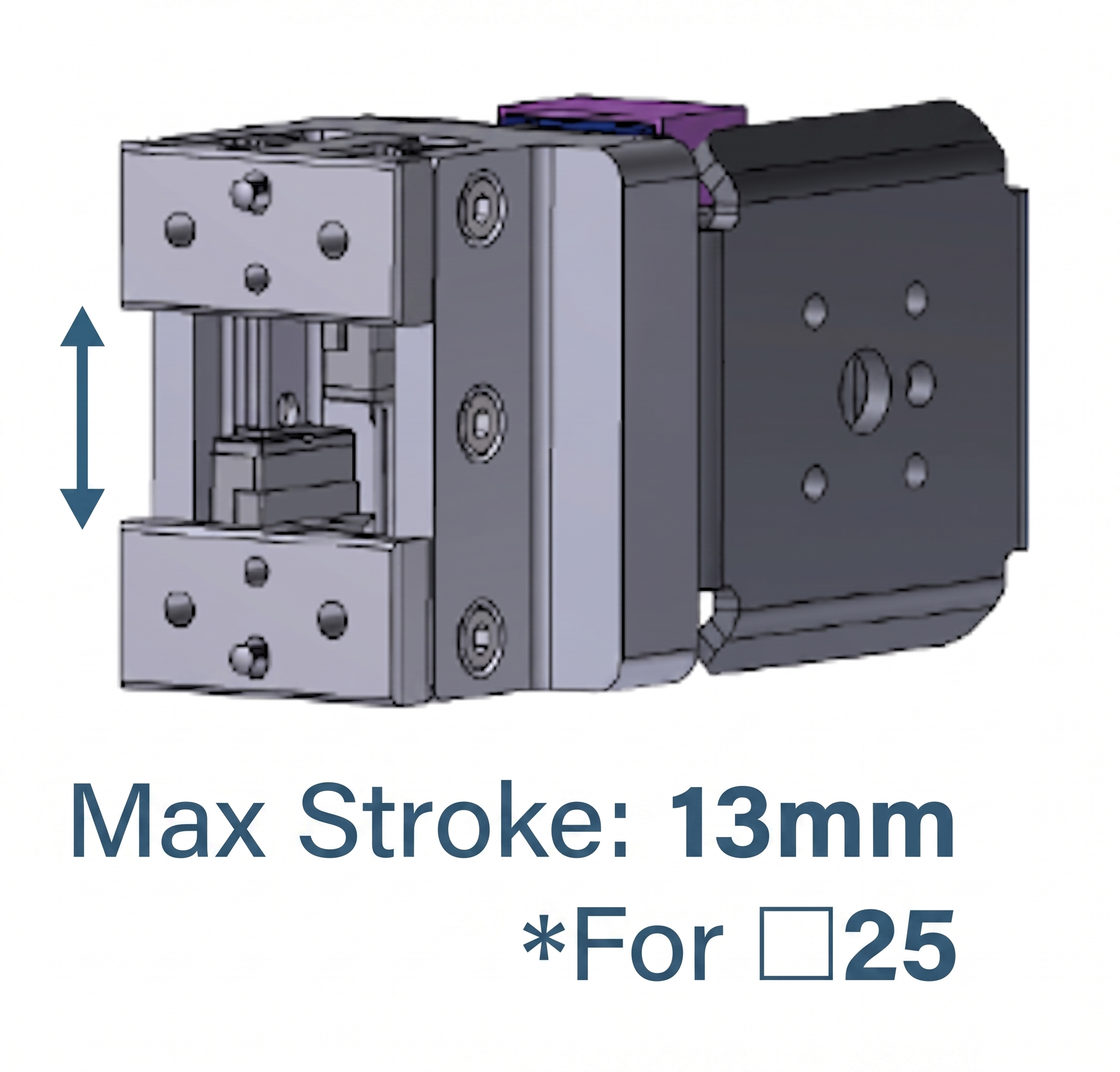
■Long Stroke
Achieves one of the longest strokes in the industry despite its compact design.
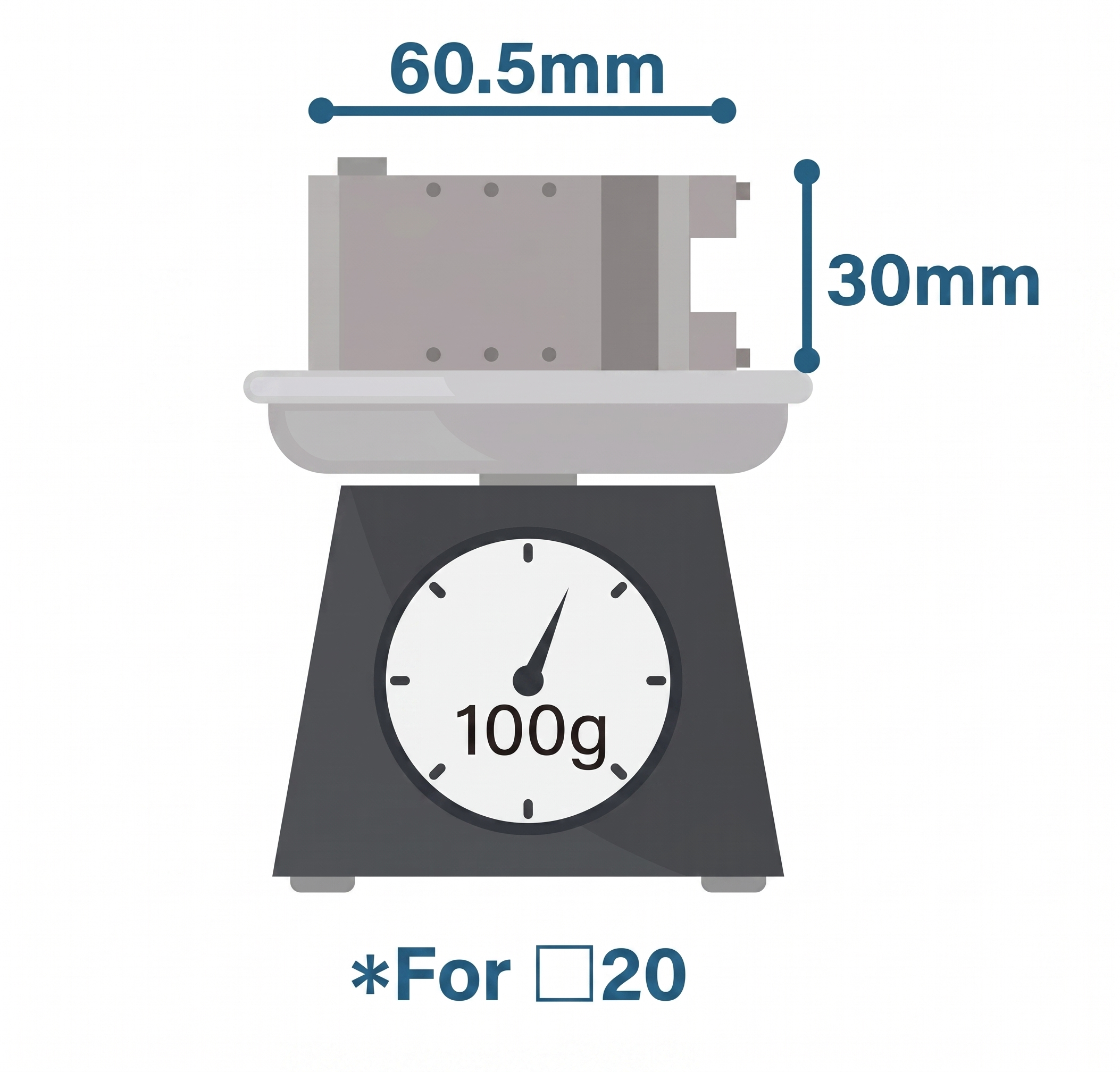
■Lightweight and Compact
Achieves industry-leading lightness and a compact size.
■High-Precision Gripping Force
Direct drive via the cam mechanism achieves high-precision gripping force of ±15%.
Enables stable gripping of various workpieces.
■Accuracy
Repeatability of ±0.02 mm for precise positioning.
Parts List
Click the arrow icon in the table below to switch from ascending to descending order.
scroll
|
Motor size (number of fingers) |
Stroke |
Grip force |
Grip force |
Repetitive positioning accuracy |
Weight |
|---|---|---|---|---|---|
| □20mm(2 fingers) | 11 | 0.7 | 2.4 | ±0.02 | 100 |
| □25mm(2 fingers) | 13 | 2.0 | 6.0 | ±0.02 | 190 |
Featured Products
Case Studies
Product Topics
Industry






Contact Us
Please click the inquiry type below according to your question. Each product / sales representative will respond to you.