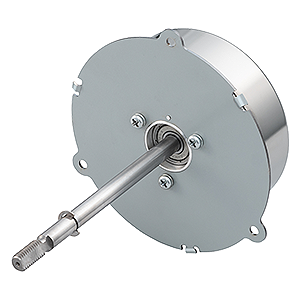
This product is equipped with a resolver (Angle sensor) along with the stepping motor, enabling servo control of the motor. We plan to expand the scope of application while maximizing the available torque from the motor.
Features
Achieves "demodulation-less" motor control that does not stop even with a high load or rapid acceleration/deceleration is applied, providing smooth operation with a resolution of 200,000 P/R.
The simple structure of the resolver also contributes to durability against the outside environment. Robust manufacturing supports a motor drive with extremely stable accuracy in harsh environments such as heat, dust, shock and vibration.
-
-
Click the arrow icon in the table below to switch from ascending to descending order.
scroll
Model
Outer Diameter
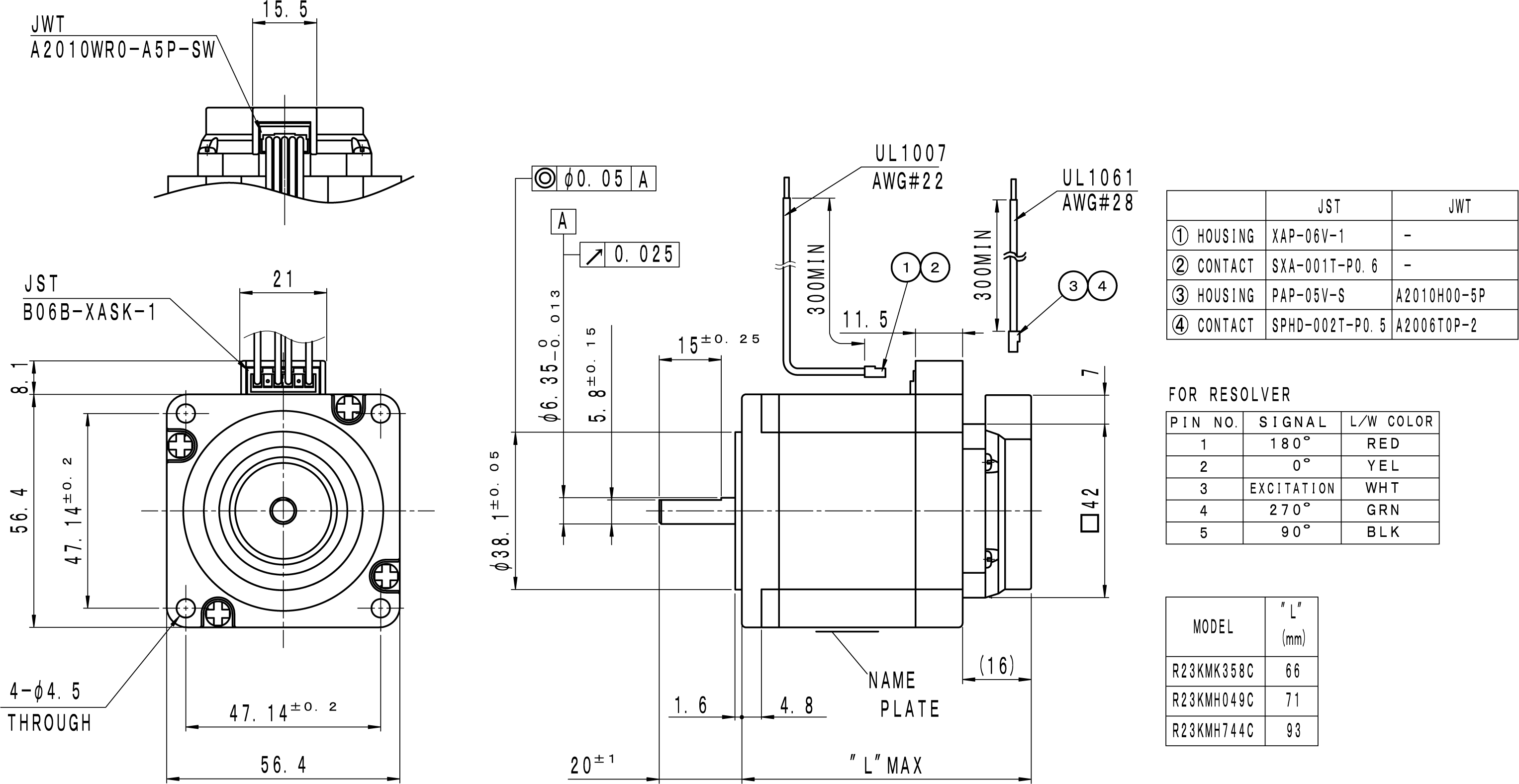
[mm]Full length
[mm]Step Angle
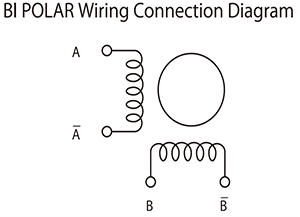
[°]Drive Sequence
Rated Current
[A]Resistance
[Ω]Holding Torque
[mN・m]Inductance
[mH]Rotor Inertia
[g・cm2]Detent Torque
[mN・m]Mass
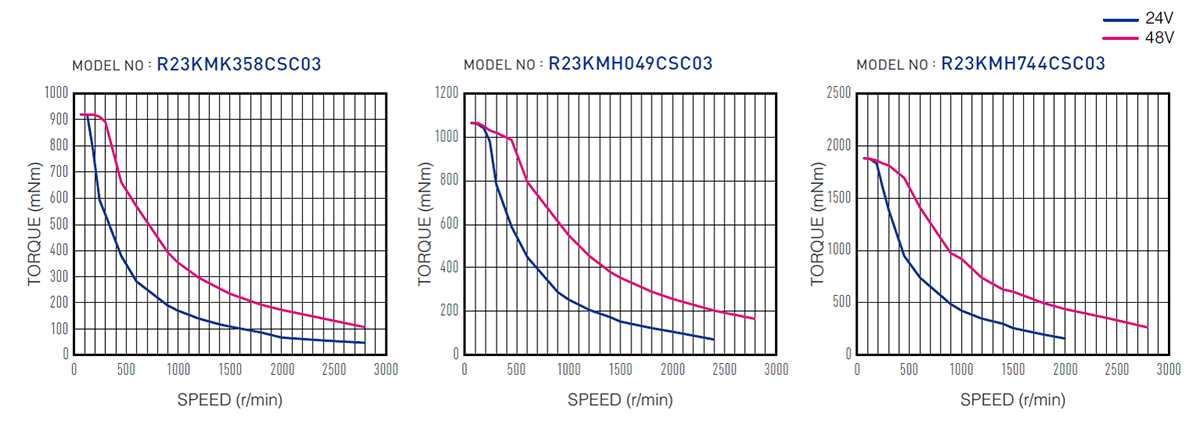
[g]R23KMK358CSC03 56.4 66.0 1.800 BI-POLAR 1.70 1.90 800 7.80 183.00 29.00 670 R23KMH049CSC03 56.4 71.0 1.800 BI-POLAR 2.00 0.90 1330 3.70 323.00 54.00 760 R23KMH744CSC03 56.4 93.0 1.800 BI-POLAR 3.00 0.70 1800 2.80 493.00 93.00 1130 -
-
-
-
scroll
PHASE
A
A COM
A/
B
B COM
B/
PIN NO. 3 - 1 4 - 6 -

To control the stepping motor with resolver, Digital converter (RDC) from Renesas Electronics Corporation And control driver software is required. For details, please see the link below.
-
Associated Data
Featured Products
Engineering Information
Technical Data
Precautions of Use
Explanation of Technical Terms
Case Studies
Download
Product Topics
Industry






Contact Us
Please click the inquiry type below according to your question. Each product / sales representative will respond to you.